
Stand: 25.07.2019 (kann in nächster Zeit noch aktualisiert und erweitert werden!)
Link zur Projektseite über die Vorbereitungen unseres ersten Ballonfluges
Bericht von Attila Kocis, DL1NUX
Am 20. Juli 2019 hob nach mehrmonatiger Vorbereitungszeit der erste Stratosphärenballon unter der Federführung des Ortsverbandes Haßberge B37 gegen 13 Uhr Ortszeit mit einstündiger Verspätung gen Himmel ab. Die Vorbereitungen dazu waren umfangreich, hatte doch – bis auf eine Ausnahme mit Dieter DG2NBN – keiner der Beteiligten jemals an solch einem Projekt teilgenommen.
Die Idee
Wie kommt man auf so eine Idee überhaupt? Im Folgenden erzählt Attila DL1NUX eine kleine persönliche Geschichte: Natürlich hat man als langjähriger Funkamateur schon einiges über Stratosphärenballone gelesen und gehört. Doch auf die Idee zu kommen, so etwas selbst mal zu probieren, dazu waren mehrere Faktoren notwendig. Ein befreundeter OM, Dieter DG2NBN, aus dem OV Forchheim B26 war seit längerer Zeit schon passionierter Wetterballonjäger. Wetterballons werden in Deutschland vom Deutschen Wetterdienst bzw. der Bundeswehr täglich mehrfach gestartet, um die Wetterbedingungen bis in die Stratosphäre zu messen und die gemessenen meteorologischen Daten mit einem Sender („Wettersonde“) zum Boden zu funken. Unter anderem aus diesen Daten entstehen dann unsere – nicht immer ganz so genauen – Wettervorhersagen für die nächsten Tage, wie wir sie im Rundfunk, in Zeitungen oder in den Wetterapps nachlesen können. Es war Anfang August 2018, als Dieter DG2NBN mich darauf ansprach, dass nicht weit von meinem Wohnort Coburg aus plötzlich Wettersonden aufsteigen würden. Ob ich denn wüsste, von wo aus die starten würden? Ich hatte keinerlei Informationen dazu, einen regulären Startort für Wettersonden gab es hier nicht. An einem Samstag machte er sich dann auf in meine Region, um dem unbekannten Treiben auf den Grund zu gehen. Letztendlich landete er mit seinen Peilungen nicht weit von meinem QTH aus am Sportflugplatz „Steinrücken“. Das was nicht mal ein Kilometer von meinem QTH entfernt – quasi in Sichtweite. Und ich hatte das nicht mitbekommen – welch eine Ironie. Am Folgetag und am Montag besuchte ich den Ort des Geschehens ebenfalls und kam mit den Beteiligten vor Ort ins Gespräch. Es handelte sich um eine Delegation Meteorologie-Studenten von der Universität München. Diese absolvierten unter der Leitung des zuständigen Professors ein freiwilliges meteorologisches Praktikum auf diesem Flugplatz. Dazu gehörte auch, dass zweimal täglich eine Wettersonde an einem Wetterballon gestartet wurde. Ich war zweimal mit dabei (Bericht hier) und hatte mit den Beteiligten auch sehr interessante Gespräche über Wettersonden und auch Meteorologie selbst.

Dieses Treffen animierte mich, auch selbst mal einer Wettersonde hinterher zu jagen. Am 16. August 2018 war es dann soweit, dass ich mit meinem Sohn gleich zwei Wettersonden an einem Tag aus Meiningen nur wenige Kilometer von meinem QTH aus aufspüren und aufsammeln konnte.

Das Fieber war damit ausgebrochen. Schnell stellte sich heraus, das weitere OMs in der Region sich für das Thema interessierten. Der Erfahrungsaustausch untereinander führte dann irgendwann zu der „irren“ Idee, es doch vielleicht selbst mal mit einem eigenen Ballon zu probieren, anstatt nur anderen hinterher zu jagen. Am Wichtigsten war es nun, Interessenten zu finden, welche sich an so einem Projekt beteiligen wollten. Sei es mit Man-Power oder auch finanziell.
Das Team
Es war nicht sonderlich schwer Interessenten für das Projekt zu finden. Prompt erklärten sich etliche Wettersondenjäger nach Bekanntgabe der Pläne bereit, am Projekt mitzuwirken. Beispielsweise im Bergungsteam oder mit einer finanziellen Spende. Im eigenen Ortsverband konnte man mit Matze DM4TZE einen sehr technikaffinen Mitstreiter finden, der zwar nicht den Wettersonden verfallen war, aber sowohl Lust und Zeit hatte sich an der technischen Entwicklung dieses Experimentes zu beteiligen. Ich machte etwas Werbung für das Projekt im Nachbar-OV Coburg B19, und konnte neben einer Geldspende auch noch einen interessierten jungen OM für unser Projekt begeistern. Robert, DK2RO, brauchte man nicht groß zu überreden. Und in Heinz, DC5WW, ebenfalls begeisterter Wettersondenjäger, fanden wir jemanden mit guten Kontakten zu einem Gashändler. Bei den teilweise sehr hohen Preisen für Ballongas, war dies eine Wohltat für unser Projekt-Budget.
Projektvorbereitungen
Es war wichtig von Anfang an das Projekt grob zu umreißen. Was haben wir genau vor? Wo bekommen wir das Material her? Wie finanzieren wir dieses Vorhaben? Wer macht mit? Wann soll der Flug stattfinden. Wo soll er stattfinden? Wen müssen wir um Erlaubnis fragen? Brauchen wir eine Versicherung? Wer fährt mit zur Bergung? Und viele weitere Fragen waren im Voraus zu klären. Es war keine einfache Sache und es musste sehr viel recherchiert, koordiniert und kommuniziert werden. Eine private Telegram-Gruppe war dafür sehr hilfreich, so konnte man Neuigkeiten einfach allen anderen zukommen lassen. Eine große Hilfe war dabei die Internetseite https://www.stratoflights.com. Dort fand man neben vielen Informationen und Tutorials auch jede Menge Hilfestellungen, wie z.B. eine Checkliste für das Projekt.
Man konnte das Ballonprojekt eigentlich grob in drei Bereiche unterteilen:
- Organisatorisches
- Ballon
- Nutzlast
Im Organisatorischen Teil mussten nicht nur Mitstreiter und Geldgeber gefunden werden. Es musste auch geklärt werden, wer alles um Erlaubnis gefragt werden muss. Denn so ein Fluggespann darf man nicht einfach so zum Spaß „auflassen“. Das muss entsprechend angemeldet und genehmigt sein. Aber um das zu klären, ist es erstmal wichtig zu wissen, wo und wann das ganze stattfindet. Nach etlichen Diskussionen und Gesprächen stellte sich heraus, dass eines unserer OV-Mitglieder, Timm DO8TBO, Zugang zu einem landwirtschaftlichen Gelände im Gemeindegebiet Untermerzbach hat, welches neben ausreichend Platz auch einen Stromanschluss und eine Internetverbindung bietet. Darüber hinaus war der Standort im Landkreisdreieck Haßberge – Coburg – Bamberg von der Lage her günstig, um von allen Teilnehmern und Interessenten ohne weite Wege erreicht werden zu können. Eine erste Besichtigung Anfang Juni verlief soweit positiv. Es musste nur noch ein günstiger Startzeitpunkt gefunden werden, an dem nicht nur möglichst alle Beteiligten Zeit haben, sondern auch keine andere wichtige Veranstaltung in Amateurfunkkreisen ansteht. In den Sommermonaten ist dies nicht ganz einfach, da überall Fielddays, große Conteste und im „normalen Leben“ auch Feste stattfinden, die gerne besucht werden. In die Urlaubszeit sollte der Termin auch nicht rutschen. Die erste Idee, den Start am Bamberger Fieldday (OV B05) zu versuchen, verwarfen wir allerdings bereits schnell, da wir nicht genug Vorlaufzeit hatten. Also einigten wir uns auf Samstag den 20. Juli. Hier gab es weder Fielddays, Conteste noch sonst irgendwelche wichtige Veranstaltungen. Alle Beteiligten signalisierten, dass sie dann Zeit hätten.
Da nun Startort und Starttag bekannt waren, konnten man sich um die Genehmigungen kümmern. Die erste Anfrage ging an die Deutsche Flugsicherung GmbH, welche den Luftraum über Deutschland überwacht. Die Anfrage ist per E-Mail Formular möglich. Nach wenigen Tagen erhielten wir bereits die Antwort, dass seitens der DFS keine weitere Genehmigung notwendig sei, da der Startort nicht in einem kontrollierten Bereich liegt. Es gibt spezielle kontrollierte Bereiche um z.B. Flughäfen und Flugplätze, wo das Auflassen eines Ballons einer Genehmigung bedarf. Diese kann formlos gewährt werden, aber auch an Auflagen geknüpft sein. Beispielweise besteht die Möglichkeit, dass man bei einem nahegelegenen Tower anrufen und um Freigabe für den Aufstieg bitten muss. Der Tower sorgt dann dafür, dass sich während der ersten Minuten des Auflassens kein Luftfahrzeug in der Nähe befindet. Die „Genehmigung“ der DFS war für uns kostenfrei.
Weiterhin muss man beim für den Startort zuständigen Luftamt um eine Genehmigung bitten. Welches Luftamt zuständig ist, kann man auch auf der Seite von Stratoflights nachlesen. Auf eine E-Mail Anfrage wurde ein Anmeldeformular als PDF versandt. Daraus war ersichtlich, dass auch eine Genehmigung des Grundstückseigentümers und der betreffenden Gemeinde bzw. Stadt notwendig war. Aufgrund des familiären Verhältnisses zum Eigentümer war die erste Unterschrift kein Problem. Auch bei der Gemeinde Untermerzbach gab es keine Probleme diesbezüglich. Nach einer kurzen Schilderung des Anliegens und etlicher Fragen dazu (mit so einem Anliegen wird eine Gemeinde wohl nicht oft konfrontiert), wurde auch dort das Formular unterschrieben und abgestempelt. Dieses Formular ging dann im Original per Post zum Luftamt nach Nürnberg. Nach etwa zehn Tagen kam die Antwort per Post mit einem für uns positiven Bescheid. Mitsamt einer ausführlichen Belehrung, zahlreichen Auflagen, und als hätte man schon darauf gewartet, auch eine Kostenrechnung. Für die Erteilung einer Erlaubnis zum Auflassen eines unbemannten Freiballons (Wetterballon) wurde eine Gebühr von EUR 60,- erhoben. Nicht wenig, aber auch nicht zu viel. Es war im Kostenrahmen und auch durch die Spenden gedeckt.
Interessant und teilweise Diskussionsbedürftig sind auch einige Auflagen dieser Genehmigung:
- Der Startplatz ist während des Aufrüst- und Startvorganges abzusperren.
- Die Abgesperrte Fläche ist während des Aufrüst- und Startvorganges von unbefugten Personen freizuhalten.
- Das unbemannte Freiballonsystem ist mit einem Bremsfallschirm auszurüsten.
- Das unbemannte Freiballonsystem muss mit einem GPS-Gerät zur Aufzeichnung des Flugweges während des Fluges ausgerüstet sein. Die Aufzeichnungen sind vom Betreiber vorzunehmen und 6 Monate aufzubewahren sowie auf Verlangen der Regierung vorzulegen.
- Die Kontaktdaten des Betreibers sind gut sichtbar anzubringen.
- Zu Beginn des Betriebs darf die Horizontalsicht nicht weniger als 5 km und die Wolkenbedeckung nicht mehr als vier Achtel betragen.
- Unfälle mit Personen oder Sachschäden … sind unverzüglich anzuzeigen.
- Für die Regulierung von … Schäden muss eine Haftpflichtversicherung … bestehen.
- Der Ballon … muss in kontrastreicher Farbe ausgeführt sein.
Während man über die Auflagen zur Horizontalsicht und zur Wolkenbedeckung noch diskutieren kann, ist das Vorhandensein einer speziellen Haftpflichtversicherung unabdinglich. Beim Absturz des Ballons kann es zu Personen- oder Sachschäden kommen. Beispielsweise könnte das Gespann auf einer Autobahn landen und so zu einem Unfall führen. Wenn man eine private Haftpflichtversicherung hat, kann man in der Regel dazu eine Zusatzversicherung abschließen, sofern solch ein Vorhaben nicht schon durch die Versicherungsbedingungen abgedeckt ist. Eine Anfrage beim Versicherungsvertreter des Vertrauens gibt hier Auskunft. Noch einfacher ist es, wenn man Mitglied im DARC e.V. ist. Die meisten aktiven Funkamateure sind das ja bereits. Der DARC e.V. hat über die HDI eine Luftfahrthaftpflichtversicherung abgeschlossen, welche durch die Ortsverbände genutzt werden kann. Dazu ist nur eine formlose Meldung des Vorhabens mit Startort und Startzeitpunkt an die DARC Geschäftsstelle notwendig. Nach positiver Rückmeldung kann man auch schon loslegen. Einzige Bedingung ist, dass es sich um eine Aktion eines Ortsverbandes/Distriktes handelt und der verantwortliche Betreiber ein Amtsträger des DARC e.V. ist, z.B. ein Ortsverbandsvorsitzender.
Sich ein Projektziel vorzugeben ist sehr wichtig. Da keiner so richtig Erfahrung mit dem Thema hatte, haben wir uns entschlossen mit einer kleinen Mission zu beginnen und uns mit der Zeit zu steigern. Hätte man alle unsere Ideen gleich beim ersten Flug verwirklichen wollen, hätten wir wohl noch Jahre der Vorarbeit gebraucht. Beim Start wäre wirklich alles für uns neu gewesen. Also haben wir uns als Ziel gesetzt, in der ersten Mission eher das „Drumherum“ kennenzulernen, uns insbesondere mit den Themen Ballon, Ballongas und Organisation zu beschäftigen. Die Nutzlast sollte eher bescheiden ausfallen, so dass es kein großer Verlust ist, wenn die Mission misslingt. Quasi ein „Testlauf“ für die großen Missionen. Das war auch eine gute Taktik. Nachdem wir einmal alles erlebt haben, kann man sich beim nächsten Versuch dann wieder mehr auf die Technik in der Nutzlast konzentrieren.
Werbung und Finanzierung
Wie weiter oben beschrieben, haben wir auch etwas Werbung gemacht. Es ist sehr hilfreich Wettersondenjäger anzusprechen. Auch kann man sein Projekt bei OV-Abenden und Fielddays vorstellen. Auf diesem Wege konnten wir vorab 280 Euro an (zweckgebundenen) Spendenorganisieren. Dadurch waren die Kosten der Durchführung, also Material und Genehmigung, gedeckt. Nicht mit eingerechnet wurde die Technik in der Nutzlast. Diese wurde ausschließlich privat und auf eigenes Risiko bereitgestellt.
Neben dem finanziellen Aspekt ist es auch wichtig in sozialen Medien und Communities Werbung für das Projekt zu machen. Beispielsweise haben wir dazu aufgerufen, möglichst viele APRS Empfänger auf 70cm mitlaufen zu lassen. Während auf 144 MHz ausreichend APRS Digis QRV sind, um die Daten mitzulesen, sieht dies auf 70cm in Deutschland ganz anders aus. Nur ganz wenige Digis lauschen auf der 70cm APRS Frequenz 432,500 MHz. Es wurde daher im Vorfeld kräftig die Werbetrommel gerührt, bspw. im Frankenrundspruch, aber auch in den Communities sozialer Medien. Geworben wurde in der deutschen Telegram-Gruppe „APRS – Automatic Packet Reporting System“, oder in der Facebook-Gruppe „Amateurfunk – APRS“. Natürlich gab es auch entsprechende Ankündigungen auf unserer Webseite sowie auf unserem Facebook und Twitter Infokanal. Für jeden schriftlich eingehenden Empfangsbericht haben wir eine QSL-Karte versprochen, in der Hoffnung, dass es den ein oder anderen animiert mitzuhören. Der gelungene Aufruf machte sich schnell bemerkbar, da während des Fluges zahlreiche OMs ihre empfangenen Daten ins APRS Netzwerk einspeisten und auf anderen Wegen (E-Mail, Messenger) ihre Empfangsberichte an uns sendeten.
Material und Technik – Ballon, Nutzlast und Empfänger
Die sehr Informative Webseite www.stratoflights.com hat uns nicht nur bei der Planung gut geholfen, sondern auch beim Beschaffen der erforderlichen Materialien. Dort kann man auch komplette Ballon-Sets erwerben, welche neben dem Ballon auch einen Fallschirm und eine spezielle Reisfeste Schnur enthalten. Aber auch in Großbritannien gibt es mit „Random Engineering“ eine Quelle für Ballons und Zubehör. Aufgrund des deutlich höheren Informationsgehalts der Webseite und der hilfreichen Tutorials haben wir uns für die deutsche Quelle entschieden. Dort haben wir ein Komplett-Set für einen 200 Gramm Ballon erworben. Später auch noch einen Ersatzballon und deinen Druckminderer. Die Video-Tutorials waren sehr hilfreich in der Durchführung der Aktion. Wie man mit einer Gasflasche umgeht, einen Ballon befüllt oder Fallschirm, Schnur und Nutzlast an einem Ballon befestigt – all das konnte man sich vorher sehr detailliert ansehen und stellte eine große Hilfe dar.
Wir hatten uns für den ersten Flug nur für eine kleine Nutzlast entschieden mit maximal 200 Gramm. Da war nicht viel Spielraum für Technik. Eine Kamera konnten wir so nicht mitschicken, war aber auch nicht unser Projektziel. Wir wollten die Möglichkeiten eines einfachen Trackings per APRS ausprobieren. Ursprüngliche Ideen einen PicoAPRS von DB1NTO mit auf die Reise zu schicken, mussten wir fallen lassen, da der dort verbaute GPS Chip laut dem Entwickler DB1NTO nicht für große Höhen geeignet ist. Möchte man GPS Daten in großen Höhen ab ca. 18 Km auswerten, muss der Empfangschip auch dazu geeignet sein. Diese Chips sind in der Regel teurer als die herkömmlichen, die für die terrestrische Nutzung vorgesehen sind. Glück für uns, das kurze Zeit vorher der neue PicoAPRS Lite von OM Taner DB1NTO veröffentlicht wurde. Die Platine enthält nicht nur ein passendes GPS Modul mitsamt APRS Tracker, sondern auch einen 1 Watt Sender für das 2m Amateurfunkband und wurde speziell für Ballonmissionen entwickelt. Dabei wiegt die Platine nur 7 Gramm ohne Akku. Perfekt für den Ballonflug! Programmieren lässt sich der PicoAPRS Lite einfach mit einem Mikro-USB zu USB-A Kabel und einem Terminalprogramm (z.B. Putty). Als Stromversorgung haben wir eine 3,6 Lithium Batterie im Mignon-Format gewählt. Die Laufzeit der Batterie wurde auch im Vorfeld getestet. Der Tracker sendete alle 30 Sekunden ein 500mW APRS Signal im Garten von DL1NUX aus, und das über eine Dauer von 48 Stunden am Stück. Das waren über 5000 APRS Pakete mit einer Batterie. Sehr erstaunlich.

Ob die 3,6V bei den geringen Temperaturen stabil blieben, konnten wir noch nicht abschätzen. Der PicoAPRS Lite benötigt laut Datenblatt mindestens 3,3V an Spannung. Eine Alternative wären auch drei 1,5V Lithium Batterien in Reihe gewesen. Das wären ca. 4,5V Spannung und hätte definitiv gereicht, auch bei Absinken der Spannung durch die geringen Temperaturen. Das war aber nicht realisierbar, da geplant war, den PicoAPRS Lite in einem Styroporgehäuse einer RS41 Wettersonde fliegen zu lassen. Dazu war schlicht nicht genug Platz im Sondengehäuse. Als Antenne verwendeten wir eine isolierte Litze mit geringem Querschnitt.

Ursprünglich hatten wir geplant die APRS Signale über einen RaspberryPi selbst zu erzeugen und auszusenden, allerdings kamen wir mit der Technik nicht schnell genug voran. Das Modul AFSKMODEM der dxlAPRS Tools funktioniert nur mit dem OSS Sound System, welches unter Raspbian leider nicht mehr Bestandteil ist. Eine Anpassung des Images ist uns leider nicht gelungen. Wir haben dieses Verfahren daher in die Projektplanung für das zweite Ballonprojekt mit aufgenommen.
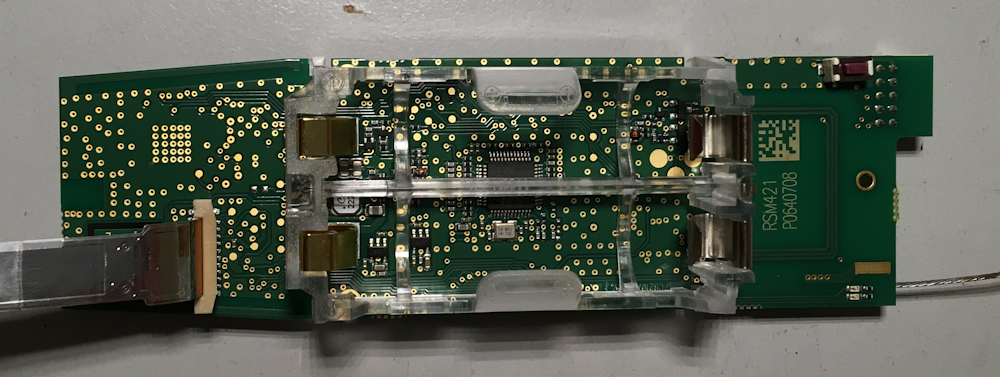
Als zweite Nutzlast haben wir uns für eine umprogrammierte Wettersonde vom Typ VAISALA RS41-SGP entschieden. Dank eines STM32 Prozessors lässt sich diese Sonde mit einer alternativen Software bespielen. Diese hat der OM Joseph OM3BC entwickelt und stellt sie auf seiner Webseite zur Verfügung. Das Aufspielen und Einrichten der Software wird auf der Webseite von DL1NUX schön beschrieben. Nach der Umprogrammierung arbeitet die Sonde als APRS Tracker und kann CW sowie RTTY Baken im 70cm Amateurfunkband ausstrahlen. Der Sender hat im Amateurfunkbereich etwa 40-50 mW Sendeleistung, was zwar nach wenig klingt, aber in entsprechender Höhe trotzdem gut zu hören sein sollte. Da wir keinerlei Erfahrung mit RTTY hatten, haben wir uns entschieden, durch die Sonde nur APRS auf 432,500 MHz und eine CW Bake auf 434,500 MHz zu senden. Da auf 70cm APRS nicht viel Betrieb ist, konnten wir dort auch ein kurzes Sendeintervall von etwa 16 Sekunden realisieren, während auf 2m nur 30 Sekunden Intervalle geplant waren.
Während 2m mit 500 mW auf 144,8 MHz das Hauptsignal aussenden sollte, wäre 70cm sozusagen das Backup gewesen. Mit der geringen Sendeleistung haben wir uns keine großen Hoffnungen über große Reichweiten gemacht.
Da auf 70cm kaum ein APRS Empfänger QRV ist, hatten wir dazu aufgerufen, zumindest vorübergehend, möglichst viele APRS Empfänger dort laufen zu lassen. Gerade die Ausbreitung auf 70cm mit der geringen Sendeleistung war ein interessantes Experimentierfeld bei diesem Projekt. Um möglichst viele OMs schnell zu überzeugen, hat DL1NUX ein Image für den RaspberryPi erstellt, welches eine vorkonfigurierte Software enthält, um APRS Signale mit einem SDR-Stick zu empfangen und in das APRS-Netzwerk weiterzuleiten. Das Image wurde auf der Projektseite unter www.bravo37.de als Download zur Verfügung gestellt. Als Software diente die dxlAPRS Toolchain von Chris OE5DXL. Es musste quasi nur das eigene Rufzeichen und der APRS-Passcode eingetragen werden, und schon konnte es losgehen.
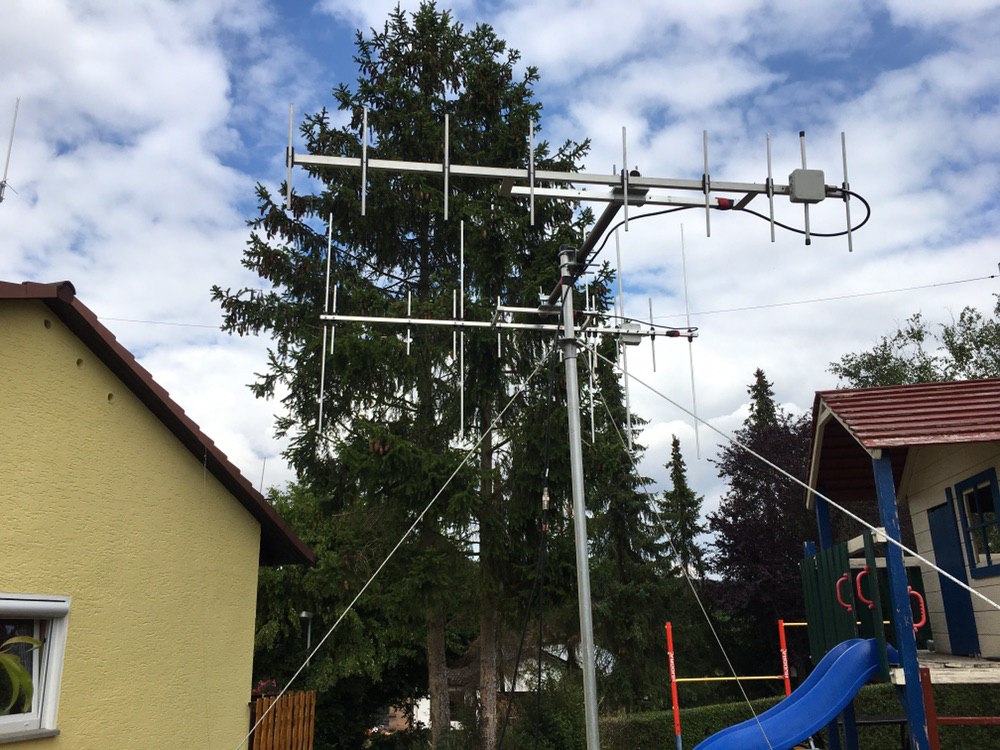
Wir selbst haben auch solche Empfänger betrieben. DL1NUX hat am Startgelände 2m und 70cm APRS per SDR-Stick mitlaufen gehabt und auch im Heimat-QTH. Zu Hause wurde sogar eine 9 Element Yagi in die vorausberechnete Flugrichtung ausgerichtet. DK2RO hat ebenfalls am Startplatz einen SDR Empfänger laufen gehabt, einen zu Hause und einen auf dem „Stiefvater“, einem Hügel bei Neustadt/Coburg. Dort hat sein Vater Norbert DL9NAC die Station bedient und die Daten über das Hamnet in das APRS-Netzwerk eingespeist. Darüber hinaus haben etliche andere Funkamateure APRS-Empfänger für den Flug in Betrieb genommen, unter anderem DH1NFJ, DB7MM, DL4AAS, DL2ECY, DB1MSO.
Die Woche vor dem Flug
Eine knappe Woche vor dem Flug trafen sich DK2RO, DM4TZE und DL1NUX bei letzterem zu einem Technik-Test. Es wurde eine komplette Empfangsstation aufgebaut und getestet. Auf einem kleinen Mast in etwa zwei Metern Höhe befanden sich auf einem Querausleger eine 9 Element Yagi für 70cm nach DK7ZB und eine 13 Element Duoband-Yagi für 2m und 70cm nach DK7ZB. Die 9 ele Yagi wurde für 70cm APRS Empfang genutzt, die Duoband-Yagi wurde für 2m APRS Empfang genutzt. Der 70cm Teil der Duoband-Yagi wurde mit einem Diplexer ausgekoppelt und sollte zu einem 70cm Empfänger geführt werden, um die 70cm Bake mitzuhören. Da wurden auch die zwei Tracker getestet und erfolgreich mit unserem Equipment empfangen.

DL1NUX hat dann noch die Tage vor dem Flug die Empfänger zu Hause etwas laufen lassen und getestet. Alles lief wie geschmiert. Es sollte also dem Experiment nichts mehr im Wege stehen. Die Wettervorhersage war auch sehr gut, sonnig und Temperaturen bis 30 Grad. Kein Regen und kaum Wolken sind für solche eine Outdoor-Aktion sehr hilfreich.
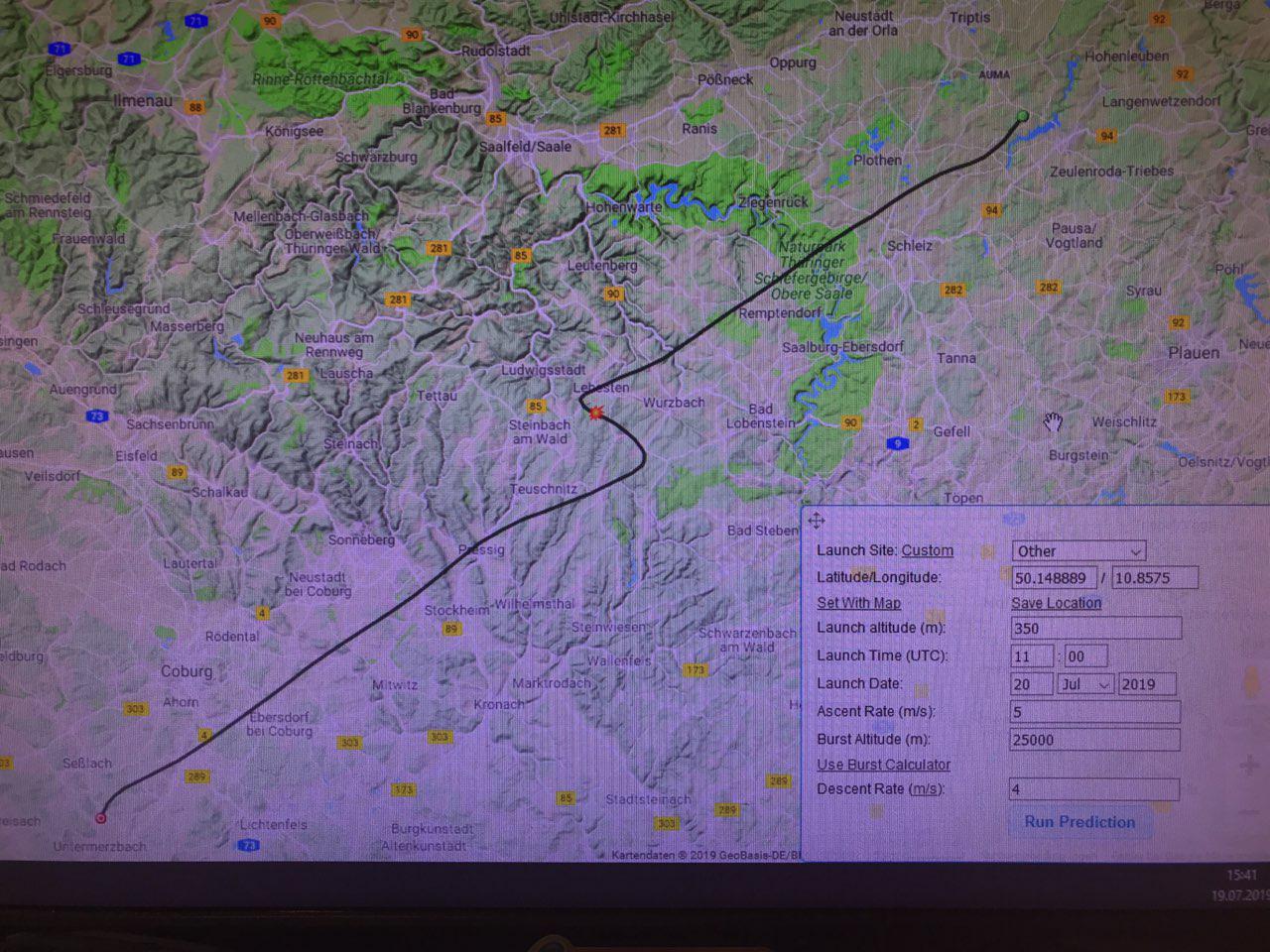
Am Tag vor dem Start wurde nochmal eine Flugvorhersage durchgeführt. Der Ballon würde wohl Nordostwärts von Untermerzbach bis nach Thüringen in die Nähe von Greiz fliegen. Eine weitere Vorhersage am Morgen vor dem Flug stellte auch eine Landung nördlich von Hof in Aussicht. Das klang alles gar nicht mal so schlecht. Vorhersagen lassen sich beispielsweise auf http://predict.habhub.org machen, oder man kann sich an den Vorhersagen für Wettersonden orientieren, z.B. auf www.wetterson.de.
Die Stunden vor dem Flug
Am Starttag um 9 Uhr trafen wir uns am Startplatz bei Untermerzbach. Timm DO8TBO brachte mit seinem Vater drei Biertischgarnituren vorbei. DL1NUX brachte neben einem Pavillon auch zwei Rechner mit SDR Empfängern, Mast, Antennen usw. auch den Ballon und die Nutzlasten mit. Robert DK2RO brachte einen weiteren PC mit SDR Empfänger mit sowie einen Yaesu FT857 zum Empfang der CW Bake. Nach und nach bauten wir die Technik auf, auch einen WLAN Access Point in der Nähe des Routers des Bauernhofs. Dieser versorgte unsere Rechner mit der notwendigen Internetverbindung und per VPN einen Zugang zum Hamnet.

Ab etwa 11 Uhr haben wir dann versucht die Nutzlasten, also die APRS Sender in Betrieb zu nehmen. Wir begannen mit der umprogrammierten 70cm Sonde, welche mit dem Rufzeichen DL0UC-11 sendete. Wir konnten die Signale sehr gut dekodieren und auf der lokalen Karte sehen. Allerdings wurden die Pakete nicht an das APRS Netzwerk weitergeleitet, oder sie wurden dort gefiltert. Sie waren jedenfalls nicht auf APRS.fi sichtbar. Die letzten bekannten Pakete stammen von den Tests wenige Tage vorher. Wir konnten uns das nicht erklären und grübelten lange. Es wurde dann testweise das Rufzeichen von DL0UC-11 auf DL1NUX-11 bzw. DL1NUX-9 geändert. Interessanterweise wurden diese Pakete einwandfrei an das APRS-Netzwerk übermittelt und waren auch auf APRS.fi sichtbar. Eine Erklärung dafür? Wir hatten keine! (Update 25.7.19: Wir kennen nun die Ursache, siehe unten). Zwischendurch kam Franz-Josef DH1NAS an den Startplatz und testete dort seine umgebaute Sonde unter dem Rufzeichen DH1NAS-11. Diese konnten wir empfangen und die Daten wurden auch einwandfrei an das APRS-Netzwerk weitergeleitet. Ob es etwas mit dem Rufzeichen zu tun hat? Jedenfalls wurde nun unsere Sonde wieder umprogrammiert auf das Rufzeichen DL0UC-11. Doch dann begannen die Probleme erst richtig. Nach dem Neustart hatte diese auch keinen GPS fix bekommen und konnte somit keine GPS Position ermitteln. Mehrfach neu gestartet, Konfiguration gecheckt, aber es passierte nichts. Man hörte nur die CW Bake mit dem Locator JJ00AA. Wir waren schon etwas verzweifelt, denn die Zeit drängte. Es gab die Idee ersatzweise die Sonde von DH1NAS zu verwenden. Dort war jedoch nur ein Koaxkabel mit Dummy-Load angelötet. Also haben wir kurzerhand einen Lötkolben organisiert und die Antenne von unserer Sonde auf die Platine von DH1NAS gelötet. Damit sollte es dann funktionieren. Doch als wir diese dann einschalteten, bekam auch sie keinen GPS fix. Wir haben nochmal die Parameter kontrolliert und angepasst (APRS Text, CW Bakentext usw.), ohne Erfolg. Das APRS Rufzeichen haben wir sicherheitshalber dann auf DH1NAS-11 gelassen, nicht dass es evtl. wieder Probleme bei der Weiterleitung gibt.

Vor lauter Verzweiflung war dann erstmal die 2m Nutzlast dran. Der PicoAPRS wurde eingeschaltet und auf den Boden gelegt, um erst einen GPS fix zu bekommen. Leider passierte aber auch hier längere Zeit rein Garnichts. Der PicoAPRS Lite sendet ohne GPS fix keine APRS Baken aus, die Frequenz blieb stumm. Sollten wir heute gar kein Glück haben? Sollte alles umsonst gewesen sein? Der Blick per App auf die GPS Satelliten zeigte, dass wir zwar drei Satelliten direkt über uns hatten, aber die anderen GPS Satelliten nahe am Horizont waren. Ob eine ungünstige Konstellation der GPS Satelliten für unsere Probleme verantwortlich war? Andere GPS Geräte, Navis und Mobiltelefone zeigten jedoch keine Empfangsprobleme. Diese nutzen aber häufig auch andere Systeme wie Glonass oder Gallileo. Der Grund des schlechten Empfangs blieb uns weiterhin ein Rätsel. Von unserer Technik verursachte Störungen waren allerdings auch nicht auszuschließen. Während DL1NUX noch mit der Technik kämpfte, machten sich DG2NBN, DK2RO, DM4TZE und DO8TBO schonmal daran Schnur und Fallschirm zu verknoten, die Schnüre für die Nutzlasten anzubringen und anschließend den Ballon aufzublasen. Als diese dann fertig waren, und der PicoARPS Lite doch nochmal neu gestartet wurde, fing auch er endlich an zu senden. Wenigstens gab es hier ein kleines Erfolgserlebnis. Also wurde der PicoAPRS Lite „eingetütet“ und an den Ballon gebunden. Was war mit 70cm? Es sendete noch immer keine Position. Entscheidung: Sie wird trotzdem angehängt, in der Hoffnung, dass er in der Höhe doch noch einen GPS fix bekommt. Solange ein Sender on Air ist, sollte das reichen. Wir drückten alle verfügbaren Daumen!







Der Flug
Um 12.58 Uhr war es dann nach einer knappen Stunde Verspätung soweit, dass langsam der Ballon aufgelassen wurde. Zwischen und Ballon und Fallschirm waren ca. 10m Schnur. Dann kamen weitere ca. 37m Schnur und am Ende waren die zwei Nutzlasten mit je einer ein und zwei Meter langen Schnur befestigt (insgesamt 50m Schnur). Dies sollte im Falle einer Baumlandung dazu führen, dass die Nutzlast möglichst zwischen den Bäumen hindurch zum Boden gleitet, und nicht in großer Höhe hängen bleibt.

Kurz nach dem Start dann große Verwunderung! Der 70cm APRS Sender sendete seine Position und Höhe sofort korrekt aus. Zwar mit dem Rufzeichen DH1NAS-11 anstatt DL0UC-11, aber besser wie gar nicht. Wurde der GPS Empfänger vielleicht doch von irgendeiner Technik gestört? Wir waren darüber jedenfalls froh, dass es nun doch noch funktionierte. Kurz darauf allerdings folgte die Ernüchterung. Vom PicoAPRS Lite als DL0UC-12 auf 144,800 MHz war nichts zu hören. Nicht eine Aussendung. Auch mehrere Minuten später war nichts zu hören. Der PicoAPRS Lite hatte wohl einen Totalausfall erlitten. Eventuell gab es ein Problem mit der Stromversorgung? Wir mussten nun einfach darauf hoffen, dass die 70cm APRS Baken ausreichen würden, um die Flugbahn des Ballons zu verfolgen und dessen Landegebiet möglichst genau herauszufinden. Da das verwendete Rufzeichen nun DH1NAS-11 lautete und nicht DL0UC-11 wie angekündigt, musste man das nun noch entsprechend in den Informationskanälen bekannt geben. Die ersten nachfragen trafen zu diesem Zeitpunkt schon ein.

Dank der 70cm APRS Bake und der zahlreichen Empfänger konnten wir nun gespannt auf APRS.fi die Flugbahn und Flughöhe verfolgen. Die geplante Flugzeit betrug 72 Minuten laut dem Heliumrechner von Stratoflights.

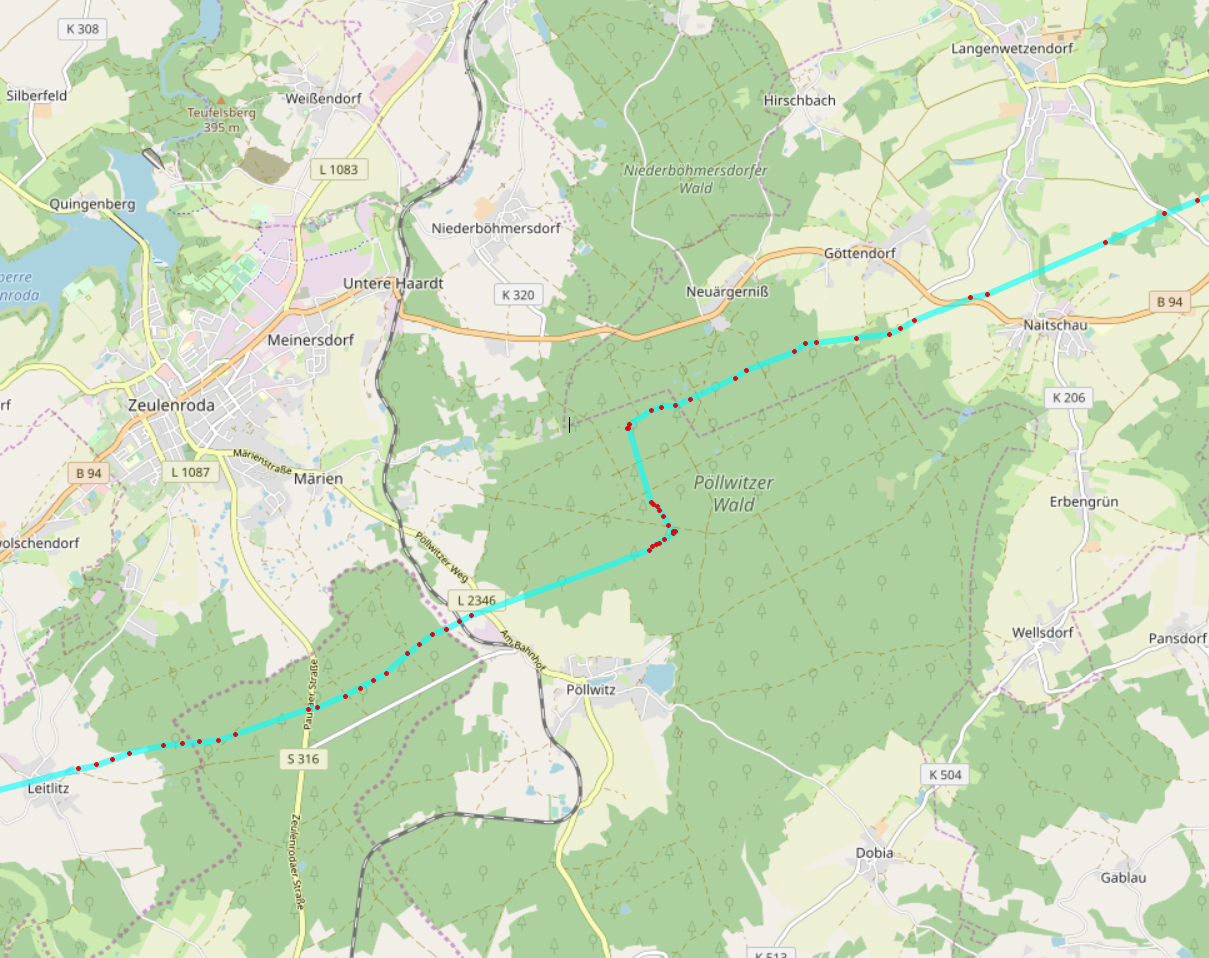
Doch nach einer halben Stunde hatte er erstmal eine Höhe von rund 5000 Metern erreicht. Wenn man bedenkt, dass der Ballon bis knapp über 20 Km Höhe fliegen soll, könnte das eine lange Reise werden. Nach einer knappen Stunde hatte er erst gute 9000 Meter Höhe überschritten. Nach 90 Minuten waren es ca. 14000 Meter. Die Flugrichtung änderte sich bis dahin auch gar nicht. Von der Wetterballonjagd weiß man, dass ab einer gewissen Höhe sich die Windrichtung ändert. Das könnte dann jede beliebige Richtung sein, auch beispielsweise zurück. Dies geschah dann bei rund 18400 Metern. Der Ballon flog nun plötzlich um etwa 90 Grad versetzt nach Nordwest. Jedoch nicht lange, denn nur kurze Zeit später ist der Ballon zerplatzt und das Gespann fiel relativ zügig nach unten. Dies geschah ziemlich genau zwei Stunden nach dem Start, also schon weit nach der errechneten Flugdauer. An dieser Stelle gab es leider ein paar GPS Aussetzer, so dass der genaue Zeitpunkt und die genaue Höhe des Platzens nicht bekannt waren. Aber es passierte gegen 14.58 Uhr in einer Höhe von knapp 19000 Metern. Also nur wenig unter der berechneten Flughöhe.
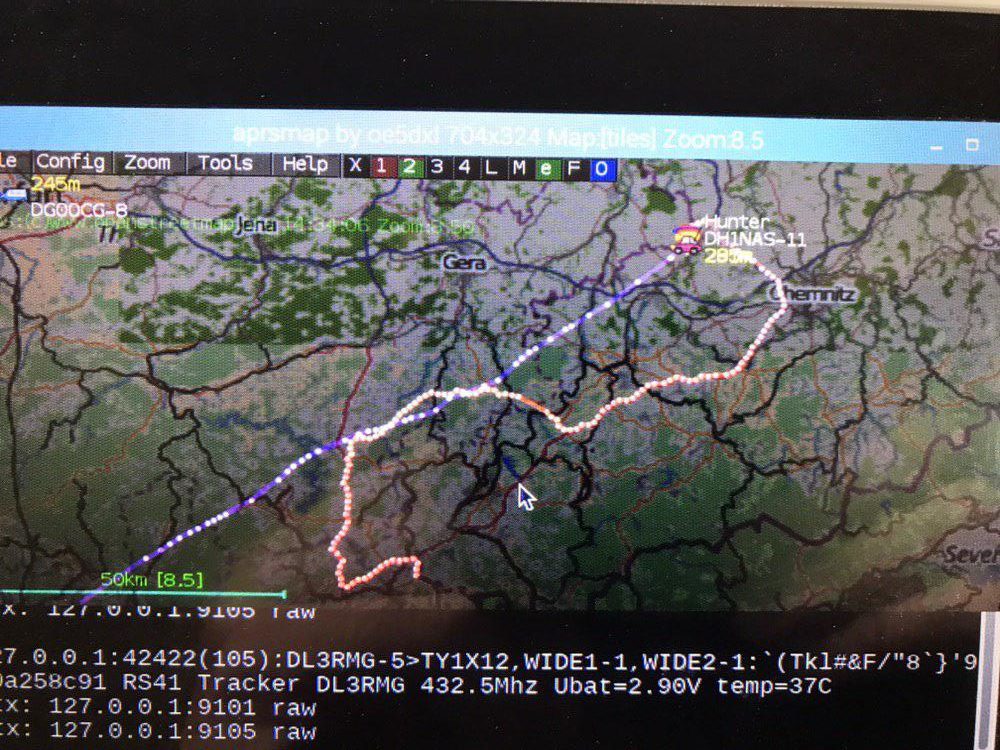
Während in der Höhe das Gespann sich schnell abwärts bewegte, wurde die Sinkgeschwindigkeit immer geringer. Das lag daran, dass die zunehmende Sauerstoffkonzentration immer mehr zur Bremse wurde. Wir beobachteten weiter, es waren immer noch APRS Pakete zu empfangen, auch wenn diese manchmal keine neuen Positionen lieferten. Das letzte APRS Paket, welches von einer Empfangsstation gehört und übermittelt wurde, kam aus der Nähe von Glauchau in einer Höhe von 4986 Metern. Empfangen wurde es von DB0WTH in der Nähe von Bad Mergentheim. Dies entspricht einer Distanz von 250 Kilometern! Man beachte, dass der Sender nur etwa 40 Milliwatt hat. Das ist schon eine erstaunliche Leistung. In der Zielregion gingen uns dann leider die lokalen Empfänger auf 70cm aus. Nun kam die kritischste Phase des ganzen Projekts. Können die Verfolger das Signal noch empfangen und bis zum Landeplatz verfolgen?
Verfolgung und Bergung
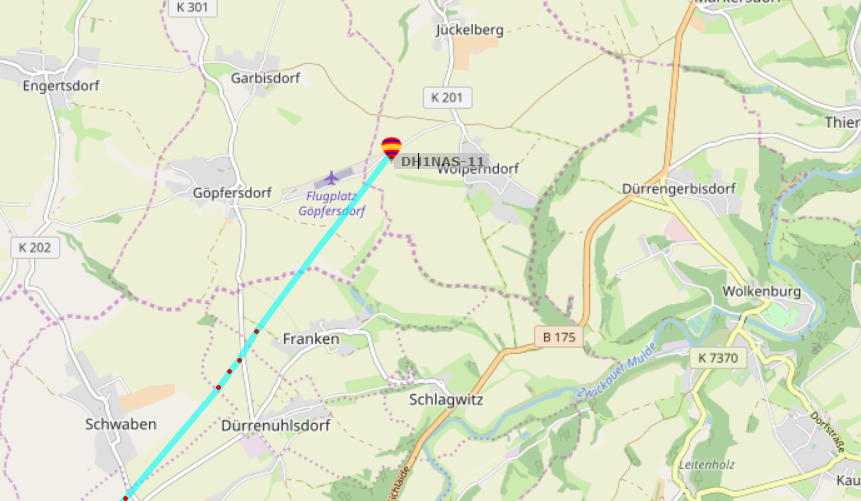
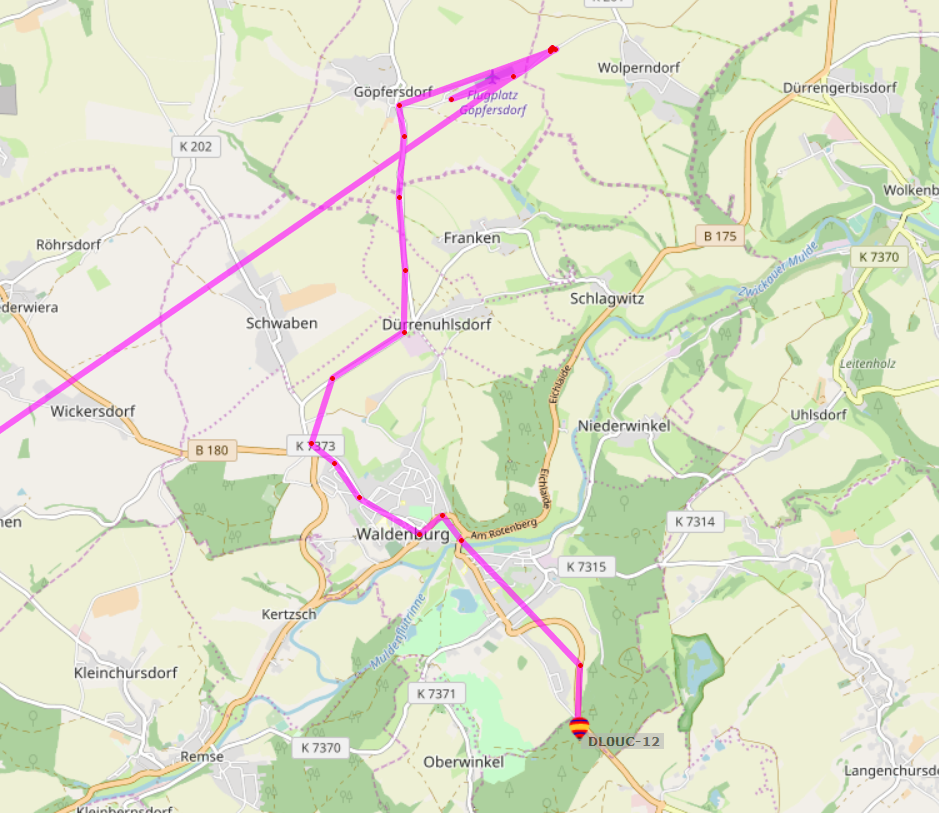
Während Dieter DG2NBN sich noch am Start tatkräftig beteiligte, begab er sich nur wenige Minuten später auch schon auf Verfolgungsjagd in das Zielgebiet. Bereits vorab hat sich SWL Markus aus Cham bei Hof positioniert, und wartete auf unseren Ballon. Dass die Wegstrecke für beide etwas länger werden würde, ahnte da noch keiner. Während Markus nur lokal empfangen konnte, konnte Dieter DG2NBN auch, sofern die Technik mal funktionierte, die Daten auf 70cm empfangen und über Mobilfunk in das APRS Netzwerk weiterleiten. Auf 2m hatte er sogar einen APRS-Digipeater, welcher empfangene Signale wieder digipeatet. Man konnte beiden Verfolgern per APRS.fi über die Schulter schauen, was recht spannend war. Warum fährt er da lang? Warum bleibt er denn stehen? Nachdem das letzte Signal von DB0WTH empfangen wurde, half nur noch der Empfänger vom mobilen DG2NBN. Dieser sendete noch etliche Pakete ins Netzwerk, so dass wir eine letzte Position um 15.59 Uhr bei 1846m Höhe sehen konnten, und zwar bei der Ortschaft „Franken“. Welch eine Ironie! Um 16.22 Uhr erhielt dann DL1NUX einen unbekannten Anruf. Ein Herr von einem Segelflugplatz bei Göpfersdorf meldete sich und teilte mit, dass sie soeben etwas an einem roten Fallschirm haben fallen sehen. Normalerweise kommt dort nur das Zugseil der Segelflieger an einem roten Fallschirm herunter, dies war jedoch am Boden. Als sie an dem Landeort ankamen, fanden sie unser Gespann. Da es vorschriftsmäßig gekennzeichnet war und auch eine Telefonnummer darauf stand, haben sie uns die Landung freundlicherweise sofort mitgeteilt. Wir waren überglücklich über diesen Anruf!
Noch während des Gesprächs erreichte Markus den Landeort und konnte die dort sehr überraschten Anwesenden über unsere Aktion informieren. Wenige Minuten später traf auch Dieter DG2NBN am Landeort ein. Nach über drei Stunden Flugzeit – berechnet waren nur ca. 72 Minuten – war die Mission mit der Bergung der Reste damit erfolgreich beendet. Die Distanz zwischen Startort und Landeort betrug rund 150km.



Noch während Dieter mit Markus vor Ort sich austauschte, bemerkten wir über APRS.fi, dass am Landeort plötzlich DL0UC-12, also der PicoAPRS Lite, sendete und gehört wurde. Dieters 2m Equipment hat die Pakete gedigipeatet, welche von DO7DOC empfangen und ins APRS Netzwerk eingespeist wurden. Das haben wir ihnen noch mitgetilt. Aber was war passiert? Eigentlich nichts, Dieter hatte das Gespann nur in seinen Kofferraum eingeladen. Dort fing es wohl plötzlich wieder das Senden an. Laut APRS.fi wurde das erste Paket um 16:49:37 mit Paketnummer 45 empfangen. Der PicoAPRS Lite zählt die Aussendungen hoch, sodass man sie anschließend im zeitlichen Verlauf gut einsortieren kann. Das nächste Paket war Nr. 99 um 17:10:28 Uhr. Und es kamen noch mehr. Entweder hatte der Aufprall oder das Aufsammeln der Nutzlast diese wieder zum Senden gebracht. Wir wissen bis heute nicht warum. Da der PicoAPRS Lite noch während der Rückfahrt sendete, hielt Dieter nochmal kurz an um diesen Auszuschalten.
Nach etwa 2 ½ Fahrt Stunden war Dieter dann auch wieder zurück, und man konnte sich über das ganze Abenteuer austauschen.
Erkenntnisse, und das, was zurückbleibt
Was haben wir an diesem Tag gelernt? Der Teil mit dem Ballongespann vorbereiten und dem Einfüllen des Heliums hat erstaunlich reibungslos und schnell geklappt, das hat uns letztendlich keinerlei Kopfzerbrechen bereitet. Doch die beste technische Vorbereitung half nicht zahlreiche Probleme zu verhindern.
Das erste Problem war, dass die 70cm Sonde am Boden mit DL0UC-11 zwar gehört wurde aber die Pakete nicht bei APRS.fi zu sehen waren. Andere Pakete die durch unseren Empfänger auf der gleichen Frequenz gehört wurden, gingen reibungslos ins Netzwerk. Ursache noch unbekannt. Eventuell wurde das Rufzeichen im Netzwerk geblockt? Aber wenn ja, warum?
| Edit 25.07.19: Nun wissen wir die Ursache.
Als Software verwendeten wir die dxlAPRS Toolchain von Chris OE5DXL. Das Gateway für die Übertragung wurde mit dem Tool UDPGATE4 verwirklicht. Dieses Gateway lief unter dem Rufzeichen DL0UC (ohne SSID). Die Sonde lief unter dem Rufzeichen DL0UC-11, der PicoAPRS Lite wäre unter DL0UC-12 gelaufen. In der Woche nach dem Flug hat DL1NUX diverse Tests zu Hause gemacht und konnte die Situation nachstellen. Im Ausgabefenster von UDPGATE4 erschien bei den Paketen von DL0UC-11 folgendes: U:cal:DL0UC-11>APBCRS,WIDE1-1,WIDE2-1:!5014.06N/01059.01EO/A=001085000/000 Der Zusatz „cal“ am Anfang der Zeile bedeutet soviel wie dass das Paket verworfen bzw. gefiltert wurde, also nicht weitergeleitet wird. So war es dann auch am Flugtag. Allerdings wussten wir damit noch nichts anzufangen. Der Entwickler Chris OE5DXL hat DL1NUX kräftig bei der Analyse unterstützt und herausgefunden, dass ein eingebauter Loop-Filter dafür verantwortlich ist. Er sollte verhindern dass Loops entstehen und filtert das eigene Rufzeichen aus der Übermittlung. Leider reagierte es anders als gewollt. So hat das Gateway „DL0UC“ alle Pakete die von „DL0UC“ stammen, also auch jene mit SSID, aufgrund dieser Regel gefiltert. Gedacht war das so allerdings nicht. Hätten wir das Gateway als DL0UC-1 betrieben, wären alle Pakete beginnend mit „DL0UC-1″ gefiltert worden. Also DL0UC-1, -10, -11 usw. bis -15“. Hätten wir als Gatewayrufzeichen DL0UC-2 oder ein ganz anderes Rufzeichen verwendet, wäre nichts gefiltert worden. Das erklärt auch warum das Gateway die ersten Pakete von DL0UC-12, welche noch vor dem Flug ausgesendet wurden, ebenfalls filterte und nicht im APRS Netzwerk ankamen. Auch das z.B. DL1NUX-9 oder DH1NAS-11 durchgewunken wurden, passt zu diesem Sachverhalt. Chris OE5DXL hat den Fehler erkannt und auch gleich seinen Programmcode optimiert und als Quellcode bereitgestellt. Einen Test werden wir in Kürze durchführen. |
Nach mehrfacher Umkonfiguration der Sonde hatten wir längere Zeit GPS Probleme. Die Sonde bekam keinen GPS fix, konnte daher ihre Position überhaupt nicht bestimmen oder sendete Positionen aus dem Atlantik oder Osteuropa. Ursache noch unbekannt. Eventuell störte unsere Technik oder vielleicht Gerätschaften vom Bauernhof, an dem wir waren? Während des Fluges, als sie dann doch wieder funktionierte, hatte sie vermutlich wieder gelegentlich GPS Probleme. Das machte sich insofern bemerkbar, dass die Sonde teilweise mehrere Minuten immer das gleiche APRS Paket bzw. die gleiche CW Bake mit der gleichen Position aussendete. Auch konnten nicht 100% aller Pakete dekodiert werden. Bei den SDR Empfängern gingen immer wieder mal einzelne Pakete verloren. OMs die das 70cm APRS Signal mit einem Funkgerät und TNC empfangen wollten, konnten fast gar nichts dekodieren. Betroffen davon waren unter anderem DB7MM und DH1NFJ. Nach eingehender Analyse von DH1NFJ konnte festgestellt werden, dass der obere Ton des Packet Radio Signals wohl zu wenig Hub hat. TNCs kommen damit nicht klar, während das für SDR-Empfänger wohl kein großes Problem darstellt. Schließt man das TNC an einem 9K6 fähigen Empfänger über den Diskriminatorausgang an, sollte das der Meinung von DH1NFJ nach bessere Ergebnisse liefern. DH1NAS hat auch festgestellt, dass das APRS Signal nicht frequenzstabil ist und um einige KHz abweichen kann. Alles in allem ist das APRS Signal der Sonde wohl brauchbar, aber technisch nicht 100% ausgereift. Sehr gut und stabil dagegen lief die 70cm CW Bake, die etwa alle 90 Sekunden sendete (Taktung einstellbar). Sie sendete das Rufzeichen DL0UC/AM und den 10-stelligen QTH Locator. Diese war auch sehr weit zu hören und aufnehmbar, auch mit kleinen Antennen, und das noch bis kurz vor der Landung.
Der PicoAPRS Lite machte ebenfalls Probleme. Erst wollte er keinen GPS fix finden, nach einem Neustart klappte es dann doch. Doch gleich nach dem Start war dann wieder Schluss, bevor er nach der Landung wieder das Senden anfing. Ursache noch unbekannt!
DL1NUX hatte mit seinem Empfangssetup vor Ort Probleme. Auf einem älteren Acer Extensa Notebook mit Linux Mint Betriebssystem schien zwar alles zu laufen, doch versagte ab und zu das Gateway zum APRS Netzwerk, auch die Dekodierung versagte manchmal. Mehrmals mussten die Anwendungen neu gestartet werden. Diese Anwendungen laufen bei DL1NUX zu Hause seit fast einem Jahr auf dem RaspberryPi3B+ im Dauerbetrieb tadellos. Aber auf dem Notebook leider an diesem Tag nicht. Das zweite Setup, das bei ihm zu Hause auf einem RaspberryPi 3b+ lief, funktionierte auch den ganzen Tag tadellos und ohne Aussetzer. Ursache könnte hier vielleicht das verwendete Betriebssystem Linux Mint sein, oder vielleicht auch eine instabil laufende 64 Bit Portierung der dxl APRS Tools unter Linux Mint. Das muss weiter getestet und ggf. mit dem Entwickler Chris OE5DXL ausgewertet werden.
Auch Dieter DG2NBN hatte auf der Fahrt öfter Probleme und musste gelegentlich anhalten, um die Programme neu zu starten. Aber auch er verwendete die dxlAPRS Tools, die Ursache könnte die gleiche wie bei DL1NUX sein.
Was wollen wir beim nächsten Mal besser machen?
Sollten wir wieder eine umgebaute Wettersonde mitschicken, werden auf jeden Fall mehrere davon vorbereitet – in der Hoffnung, dass eine davon funktioniert. Vielleicht schicken wir auch mehr als eine mit. Der PicoAPRS muss wohl auch mechanisch etwas besser verpackt werden, auch bezüglich der Stromversorgung, um Ausfälle zu vermeiden. Natürlich wird auch dann mehr Technik verbaut sein. Eine oder mehrere Kameras werden dabei sein, vielleicht ein Packet Radio Digipeater oder ein Hamnet Access Point. Ideen gibt es viele. Aber zuerst müssen wir uns wohl um die Technik kümmern und uns klar werden, warum diese nicht so wollte wie geplant. Und ein nächstes Mal wird es auf jeden Fall wieder geben, darüber sind sich alle Beteiligten schon sicher.
Lieber Attila, liebes Team,
vielen Dank für diesen wunderbaren Bericht. Auch mit knapp 20 Starts auf dem Buckel bleibt es immer wieder ein Erlebnis, siehe unseren dreigeteilten Ballon auf der HAM2019.
Die seltsamen Probleme mit dem GPS verfolgen uns seit dem ersten Tag und haben schon manchen Start verzögert. Wir sind bis heute nicht dahinter gekommen, was passiert ist. Gut, zu Anfang waren die Empfänger noch deutlich schlechter. Zwischendurch hatten wir den Eindruck, dass die Nutzung der aktiven GPS-Antenne auf dem Dach während der Programmentwicklung den Eingang beschädigt und die Empfindlichkeit reduziert. Auf jeden Fall ist es in letzter Zeit besser geworden, seit dem die Antenne nur noch lose angekoppelt wird. Und auch wir haben gerade wieder die Erfahrung gemacht, dass die Aussendungen nicht zu sehr am GPS hängen dürfen – Ausfälle gehören quasi dazu… Unser picoAPRSlite hat dagegen gut funktioniert, allerdings scheint er das Energiesparen der stabilen Positionserkennung vorzuziehen – da ist noch Konfigurationsbedarf.
Schön, dass die auf die Schnelle aufgebaute Empfangsstation bei DB0WTH Ergebnisse geliefert hat – da hat sich das morgendliche Umkonfigurieren des Brettes, das wir auf der HAM dabei hatten, und das Ersteigen des 30m hohen Wasserturms doch gelohnt.
Euch weiter viel Spass und Freude beim Ballonbauen und -starten!
73 de Jens DL4AAS
Hallo Attila,
ein toller Bericht, da hast du dir viel Arbeit gemacht.
Hallo zusammen.
dass der Pico kein GPS Fix gefunden hat, könnte auf eine gebrochene GPS Keramik-Antenne hindeuten. Die Antenne kann bei mechanischer Belastung brechen. Sie ist aus Keramik.
Sehen tut man das nicht. Aber wenn man die Antenne auslötet, fällt meistens ein „Lötanschluss“ ab.
Die Antenne ließe sich zur Not auch durch ca. 9,5cm Draht ersetzen. Bereits erfolgreich getestet.
Bei Fragen gerne direkt an mich wenden!
73 Taner
DB1NTO